# Move Rotation 2D
Rotates the Rigidbody to *angle* (given in degrees).
Rotates the Rigidbody to the specified *angle* by calculating the appropriate angular velocity required to rotate the Rigidbody to that angle during the next physics update. During the move, angular drag won't affect the body. This causes the object to rapidly move from the existing angle to the specified *angle*.\
\
Because this feature allows a Rigidbody to be rotated rapidly to the specified *angle*, any colliders attached to the Rigidbody will react as expected i.e. they will produce collisions and/or triggers. This also means that if the colliders produce a collision then it will affect the Rigidbody movement and potentially stop it from reaching the specified *angle* during the next physics update. If the Rigidbody is kinematic then any collisions won't affect the Rigidbody itself and will only affect any other dynamic colliders.
{% hint style="info" %}
Rigidbody2D components have a fixed limit on how fast they can rotate therefore attempting to rotate large angles over short time-scales can result in the Rigidbody not reaching the specified *angle* during the next physics update. It is recommended that you use this for relatively small rotational movements only.
{% endhint %}
**To create it**, right-click on free space in AI Tree inspector and select Create Node/Tasks/Rigidbody2D/Move Rotation 2D.
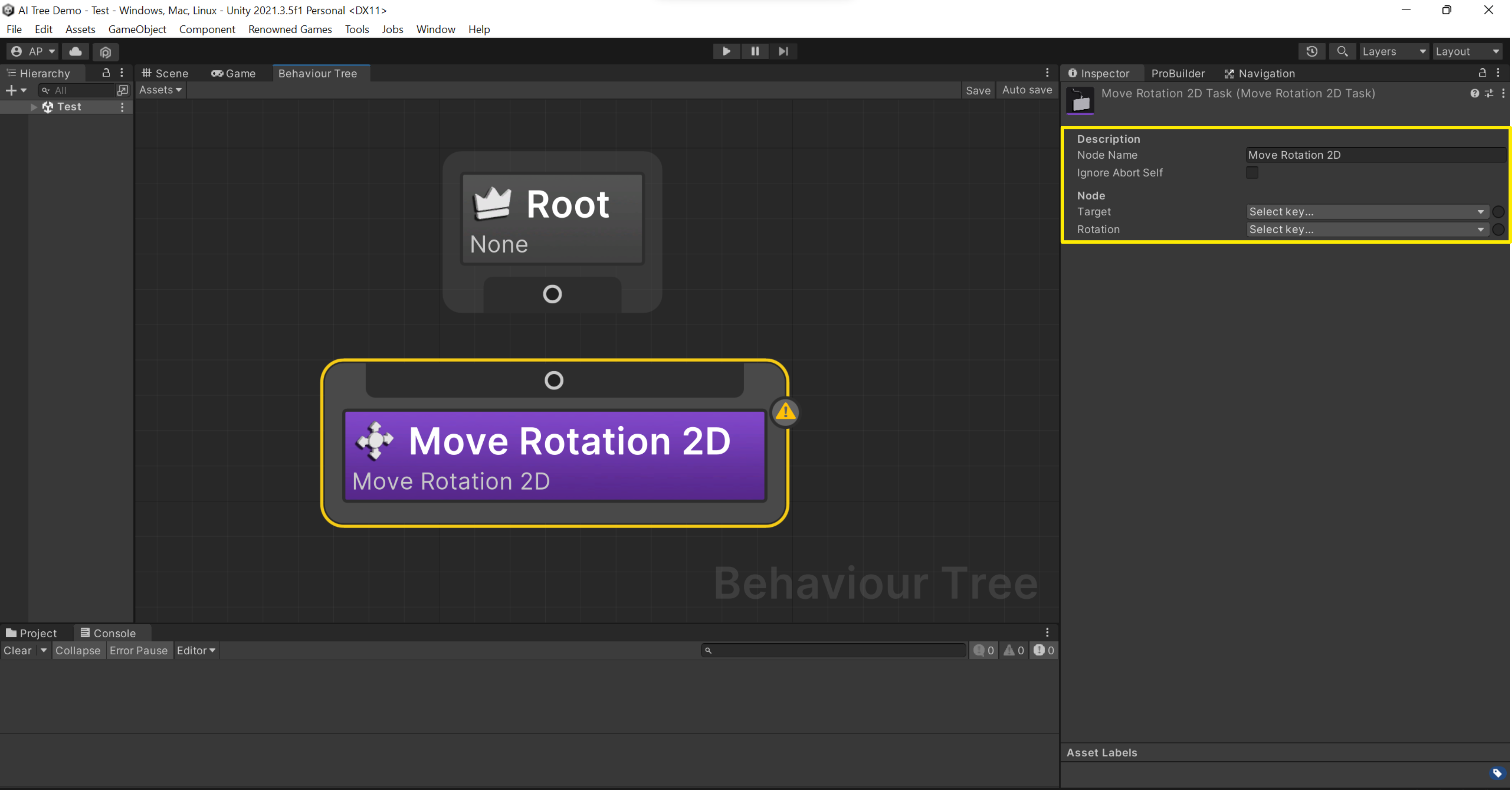
This task node has a number of fields, that are highlighted in picture below.
### Fields
| Name | Description |
| ----------------- | -------------------------------------- |
| Node Name | Name of node |
| Ignore Abort Self | Whether node ignores abort self or not |
| Target | Target to which force is added |
| Rotation | New rotation for the Rigidbody |